





Çizgi İzleyen Robot ve Engelden Kaçan Robot Demonte Kit
423,00 TL + KDV
Kategori
Stok Kodu
EMPQST78
Fiyat
423,00 TL + KDV
KDV Dahil Fiyatı
507,60 TL
* 52,49 TL den başlayan taksitlerle!!

1.Description:
ZK-CAR is an intelligent control car that measures distance by infrared sensor to achieve obstacle avoidance, tracking and following functions.It is suitable for experimental teaching; scientific experiment; practical operation.
NOTE: The tracking car kit does NOT contain battery. Pictures with battery are only for the reference of finished product effect! Hope for your understanding.
2.Features:
1>.Support tracing function
2>.Support obstacle avoidance function
3>.Support following function
4>.Automatic sensing adjustment
5>.Support select work mode
3.Parameters:
1>.Product Name:ZK-CAR Intelligent Car
2>.Product Number:ZK-CAR
3>.Working Voltage:DC 4.5V
4>.Following Sensor:TCRT5000
5>.Tracking :Infrared sensor
6>.Working Temperature range:-20℃~85℃
7>.Working Humidity range:0%-95%RH
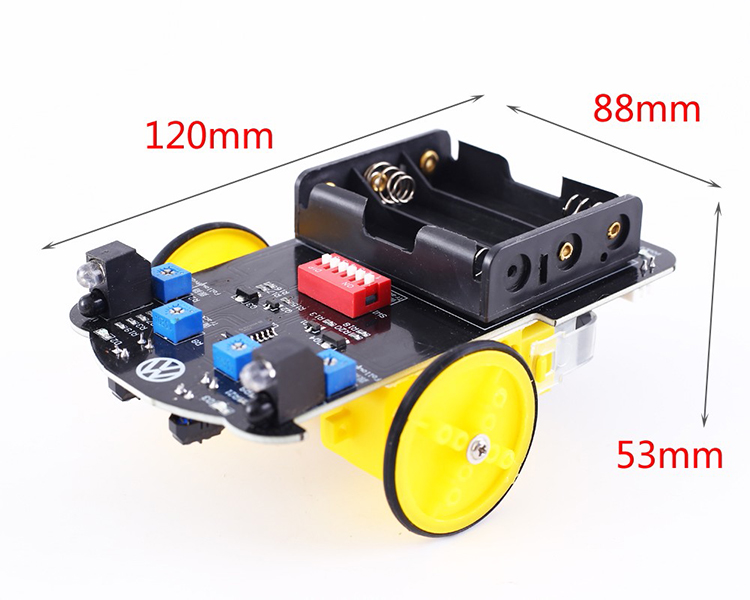
8>.Installed Size:120*88*53mm
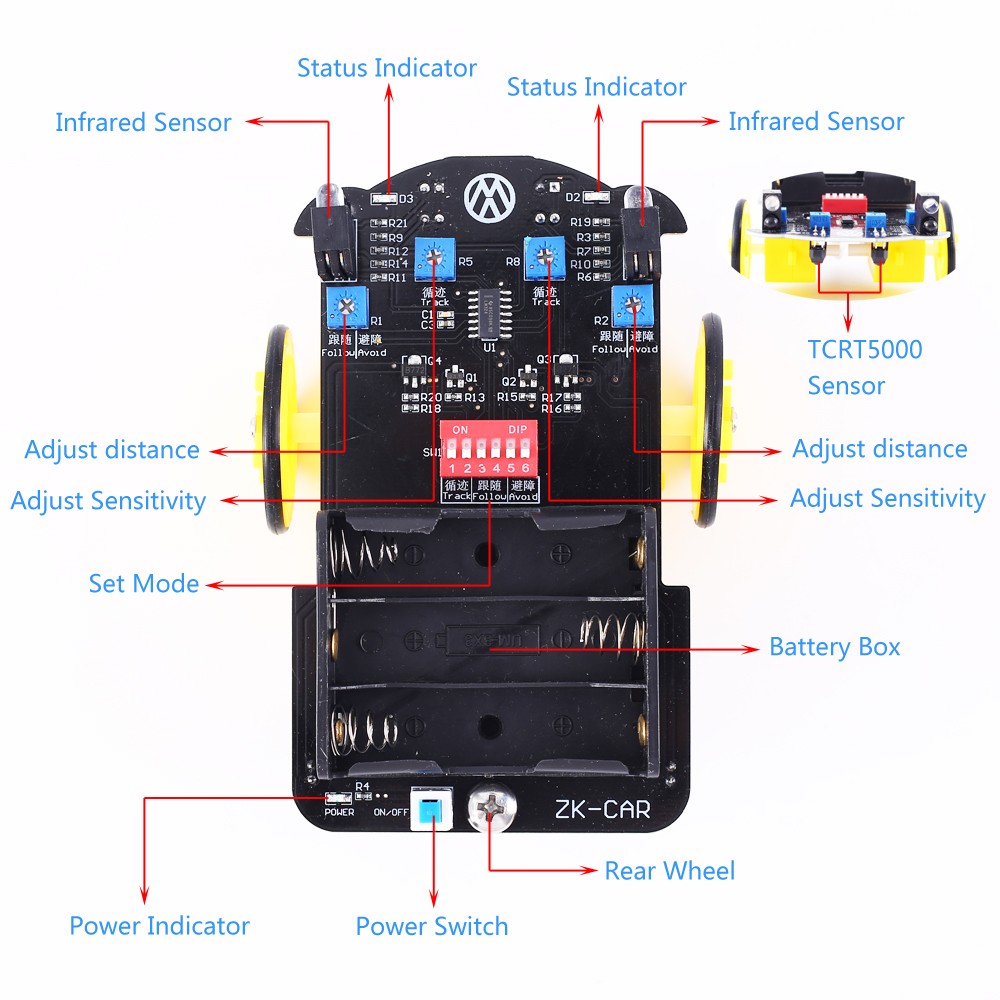
4.Potentiometer Introduction:
1>.R5 Potentiometer:It is used to adjust the sensitivity of the left TCRT5000 sensor for Tracking function.Clockwise rotation increases sensitivity.
2>.R8 Potentiometer:It is used to adjust the sensitivity of the right TCRT5000 sensor for Tracking function.Clockwise rotation increases sensitivity.
3>.R1 Potentiometer:It is used to adjust the sensitivity of the left infrared sensor for Following and Obstacle Avoidance function.Clockwise rotation increases sensitivity and increase sensing distance.
4>.R2 Potentiometer:It is used to adjust the sensitivity of the right infrared sensor for Following and Obstacle Avoidance function.Clockwise rotation increases sensitivity and increase sensing distance.
5>.SW1 Switch:Select work mode.The 1st and 2nd switches are used to select Tracking function if they are both turn ON.The 3rd and 4th switches are used to select Following function if they are both turn ON.The 5th and 6th switches are used to select Obstacle Avoidance function if they are both turn ON.
6>.ON/OFF Button:Work power indicator.
5.Tracking Function:
1>.Turn ON the 1st and 2nd switches at the same time.
2>.Principle: Tracking sensor is a pair TCRT5000 sensor.Black background absorbs light and white background reflected light.So TCRT5000 receiver can not receive signal from TCRT5000 transmitter if the signal launch to black background.TCRT5000 receiver can receive signal from TCRT5000 transmitter if the signal launch to white background.
Our track is black and the background is white.So the track can absorbs signal from TCRT5000 transmitter so that the receiver can not receive signal.That means the car deviates from the original track.Then the car automatically adjusts the direction and returns to the normal track.
Smart car will turn right if the right sensor detects the black track(this sensor can not receive signal means detects black track).Car will turn left if the left sensor detects the black track.
3>.Adjust sensitivity:Place car on white background.Adjust R5 and R8 potentiometer to make sure car go ahead normally.The LED indicator will turn ON automatically.Place the cart in the center of the black track and turn ON work power.The car can move along the black tracking.
6.Following Function:
1>.Turn ON the 3rd and 4th switches at the same time.
2>.Principle:Tracking sensor is a pair infrared sensor.Change the movement direction of the smart car by detecting whether there is an obstacle in front of the sensor.Infrared transmitter send a signal.Signal will be receive by infrared receiver if there is a obstacles in front and reflected signal.Then the smart car will move to obstacles.Smart car stop move if there is no obstacles in front.Turn right(right motor stop and left motor go ahead) if there is an obstacles at right.Turn left(left motor stop and right motor go ahead) if there is an obstacles at left.
3>.Adjust detection distance:Adjust R1 and R2 potentiometer to change detection distance.Clockwise rotation increases sensitivity.
4>.Following Function and Obstacle Avoidance Function movements are just the opposite.Following Function move to obstacles so that need obstacles move. Obstacle Avoidance Function avoid move to obstacles so that need obstacles to be fixed.
7.Obstacle Avoidance Function:
1>.Turn ON the 5th and 6th switches at the same time.
2>.Principle:Tracking sensor is a pair infrared sensor.Change the movement direction of the smart car by detecting whether there is an obstacle in front of the sensor.Infrared transmitter send a signal.Signal will be receive by infrared receiver if there is a obstacles in front and reflected signal.Then the smart car will avoid move to obstacles.Smart car go ahead if there is no obstacles in front.Turn right(right motor stop and left motor go ahead) if there is an obstacles at left.Turn left(left motor stop and right motor go ahead) if there is an obstacles at right.
3>.Adjust detection distance:Adjust R1 and R2 potentiometer to change detection distance.Clockwise rotation increases sensitivity.
4>.Following Function and Obstacle Avoidance Function movements are just the opposite.Following Function move to obstacles so that need obstacles move. Obstacle Avoidance Function avoid move to obstacles so that need obstacles to be fixed.
8.Installation/Using steps:
1>.Confirm that there are no missing accessories.
2>.Differentiate the left and right motor, please refer to the description picture.
3>.Install wheel for two motors.
4>.Paste 2pcs double-sided adhesive on white area of PCB which marked R and L.
5>.Paste 2pcs motor on the double-sided tape.Pay attention to distinguish between left and right motor.
6>.Install fixed pillar as rear wheel.
7>.Install 3pcs AA batteries on battery box.(Package does not include battery!)
8>.Select Tracking Function by turn ON the 1st and 2nd switches at the same time to running smart car.Adjust R5 and R8 potentiometer to make sure car go ahead normally.
9>.Select Following Function by turn ON the 3rd and 4th switches at the same time to running smart car.Adjust R1 and R2 potentiometer to change detection distance.
10>.Select Obstacle Avoidance Function by turn ON the 5th and 6th switches at the same time to running smart car.Adjust R1 and R2 potentiometer to change detection distance.
9.Note:
1>.It uses an infrared sensor and therefore cannot be used in sunlight.It is recommended to use it indoor.
2>.It comes without AA battery.It needs prepare in advance by user.
3>.Only one working mode can be selected at the same time.
4>.Please read use manual and description before use.
10.Application:
1>.Experimental teaching
2>.Scientific experiment
3>.Practical operation
4>.Technology competition
5>.Develop interest
11.Package:
1>.1pcs ZK-CAR Intelligent Car PCB with installed components
2>.2pcs TT Motor
3>.2pcs Double-sided tape
4>.1pcs M4.5+29mm Screw
5>.1pcs M4.5 Nut
6>.1pcs M4.5 Screw Cap
7>.2pcs Self-tapping screw
8>.1pcs screwdriver
Bu ürüne ilk yorumu siz yapın!